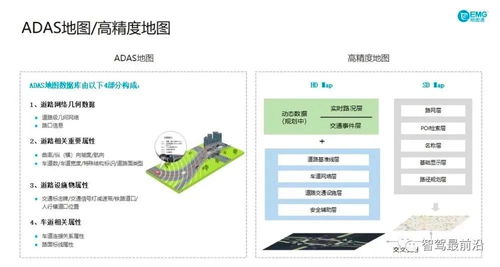
在自動駕駛、智慧城市及智能交通系統快速演進的浪潮中,高精度地圖作為核心基礎設施之一,其重要性日益凸顯。它不僅提供厘米級的道路幾何信息,更集成了豐富的語義層(如車道線、交通標志、路緣石等),成為智能系統感知與決策的“超視距傳感器”。其發展并非一帆風順,在計算機軟硬件技術開發的推動與制約下,高精度地圖正經歷著機遇與挑戰并存的復雜局面。
一、發展現狀:技術融合驅動下的快速迭代
- 數據采集與處理技術的演進:傳統的專業采集車搭載激光雷達、攝像頭、GNSS/IMU等傳感器,成本高昂、效率有限。當前,技術發展正呈現兩大趨勢:一是傳感器小型化、低成本化與高性能化并行,如固態激光雷達和更高性能的視覺傳感器的普及;二是眾包采集模式的興起,通過海量普通車輛或智能設備采集數據,結合AI算法進行融合與重建,顯著提升了數據鮮度和覆蓋范圍。在數據處理端,基于深度學習的自動化要素識別、矢量化建模技術已逐步成熟,大幅減少了人工標注的工作量,提升了地圖生產效率。
- 地圖規格與服務的標準化探索:行業內已形成對高精度地圖基本要素(如車道模型、定位圖層、動態信息層)的共識。以導航電子地圖(NDS)、自動駕駛地圖數據格式(ADASIS)等為代表的標準正在推廣,旨在解決不同廠商、不同車輛平臺之間的數據兼容性問題。云平臺與端側能力的協同成為服務新模式,通過OTA(空中下載技術)實現地圖數據的動態更新與分發。
- 軟硬件協同的計算架構:高精度地圖的應用對車載計算平臺提出了極高要求。一方面,需要強大的計算能力(如高算力域控制器)實時處理定位、匹配與融合任務;另一方面,高效的存儲與檢索算法(如分層、分塊索引)以及專為地圖優化的硬件(如大容量、高帶寬存儲芯片)也至關重要。邊緣計算與云計算的分工協作,正成為處理海量地圖數據與實時需求的關鍵架構。
二、主要發展瓶頸:技術開發面臨的深層挑戰
- 數據“鮮度”與覆蓋范圍的矛盾:高精度地圖要求極高的實時性與準確性。道路網絡日新月異,傳統集中式采集更新模式難以滿足全局“鮮度”需求。眾包模式雖能提升更新頻率,但又帶來了數據質量參差不齊、安全與隱私風險、海量數據處理成本激增等新問題。如何在保證精度與安全的前提下,構建高效、低成本的動態更新體系,是軟硬件技術共同面臨的難題。
- 制圖成本與商業模式的困境:高精度地圖的采集、生產、維護需要巨大的資本與技術投入。當前,其商業模式仍不清晰,主要依賴向車企或方案商提供授權或服務收費。面對激烈的市場競爭和車企自研地圖的趨勢,圖商面臨盈利壓力。這反過來制約了在更先進采集設備、更強大AI算法以及更完善云平臺等軟硬件技術上的持續投入。
- 技術標準與法規的滯后:高精度地圖涉及國家安全、個人隱私和數據主權。各國在數據采集(特別是測繪資質)、加密傳輸、存儲與使用等方面的法規差異巨大且尚在完善中,這為技術的全球化開發與應用設置了壁壘。行業技術標準尚未完全統一,導致數據格式、接口、質量評估體系各異,增加了系統集成成本和生態碎片化風險。
- 極端場景與長尾問題的挑戰:盡管主流道路場景的制圖技術已相對成熟,但在惡劣天氣(如大雨、大雪、大霧)、復雜城區環境(如立體交通、無明確標識路段)以及突發臨時路況下,傳感器的可靠性下降,基于此生成或更新的地圖數據質量難以保障。這對傳感器的魯棒性、算法的泛化能力以及多源融合技術提出了極限考驗。
- 算力與功耗的平衡難題:在車端,實時的高精度地圖定位、匹配與渲染需要消耗大量計算資源,這與汽車電子對低功耗、高可靠性的要求形成矛盾。開發專用芯片(如ASIC、FPGA)或優化算法以提升計算效率、降低功耗,是硬件開發與軟件算法協同優化的重要方向,但技術門檻高、研發周期長。
高精度地圖的發展將更深度地融入人工智能、云計算、邊緣計算和下一代通信技術(如5G/6G)的演進洪流中。突破瓶頸的關鍵在于軟硬件技術的協同創新:通過更智能的AI算法提升數據自動化處理水平與場景適應能力;通過更先進的傳感器與計算硬件降低成本、提升性能;通過更完善的云邊端架構與行業標準構建高效、安全的動態地圖生態。只有跨越這些技術開發上的崇山峻嶺,高精度地圖才能真正成為賦能全域智能的堅實數字底座。